QGyroscopeReading¶
The
QGyroscopeReadingclass represents one reading from the gyroscope sensor. More…

Detailed Description¶
QGyroscopeReading Units¶
The reading contains 3 values, measured in degrees per second that define the movement of the device around the x, y and z axes. Unlike
QRotationReading, the values represent the current angular velocity rather than a fixed rotation. The measurements are in degrees per second.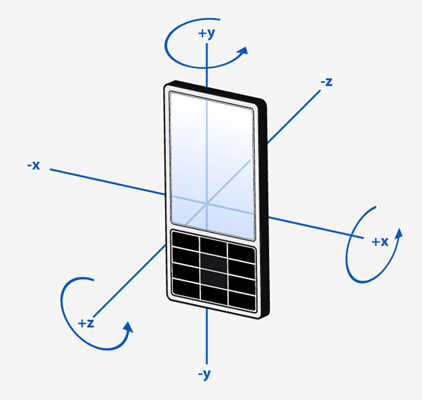
-
class
QGyroscopeReading(parent)¶ - Parameters
parent –
QObject
-
PySide2.QtSensors.QGyroscopeReading.setX(x)¶ - Parameters
x –
qreal
Sets the angular velocity around the x axis to
x.See also
-
PySide2.QtSensors.QGyroscopeReading.setY(y)¶ - Parameters
y –
qreal
Sets the angular velocity around the y axis to
y.See also
-
PySide2.QtSensors.QGyroscopeReading.setZ(z)¶ - Parameters
z –
qreal
Sets the angular velocity around the z axis to
z.See also
© 2018 The Qt Company Ltd. Documentation contributions included herein are the copyrights of their respective owners. The documentation provided herein is licensed under the terms of the GNU Free Documentation License version 1.3 as published by the Free Software Foundation. Qt and respective logos are trademarks of The Qt Company Ltd. in Finland and/or other countries worldwide. All other trademarks are property of their respective owners.