QRotationReading Class
La clase QRotationReading representa una lectura del sensor de rotación. Más...
| Cabecera: | #include <QRotationReading> |
| CMake: | find_package(Qt6 REQUIRED COMPONENTS Sensors)target_link_libraries(mytarget PRIVATE Qt6::Sensors) |
| qmake: | QT += sensors |
| Hereda: | QSensorReading |
Propiedades
Funciones públicas
| void | setFromEuler(qreal x, qreal y, qreal z) |
| qreal | x() const |
| qreal | y() const |
| qreal | z() const |
Descripción detallada
Unidades QRotationReading
La lectura de rotación contiene 3 ángulos, medidos en grados que definen la orientación del dispositivo en el espacio tridimensional. Estos ángulos son similares a los de guiñada, cabeceo y balanceo, pero se definen utilizando únicamente la rotación a la derecha con ejes definidos por el sistema de coordenadas cartesianas a la derecha.
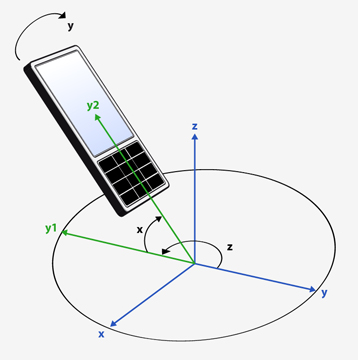
Los tres ángulos se aplican al dispositivo en el orden siguiente.
- Rotación a derechas z (-180, 180]. Partiendo del eje y y aumentando en el sentido contrario a las agujas del reloj.
- Rotación a la derecha x [-90, 90]. Partiendo del nuevo eje y (una vez rotado) e incrementando hacia el eje z.
- Rotación a la derecha y (-180, 180]. Partiendo del nuevo eje z (dos veces girado) e incrementando hacia el eje x.
He aquí una visualización que muestra el orden en que se aplican los ángulos.
El punto 0 para el ángulo z se define como una entidad externa fija y es específico del dispositivo. Aunque normalmente se utiliza el Norte magnético como punto de referencia, puede que no sea así. No intente comparar valores para el ángulo z entre dispositivos o incluso en el mismo dispositivo si se ha movido una distancia significativa.
Si el dispositivo no puede detectar una entidad externa fija, el ángulo z siempre será 0 y la propiedad QRotationSensor::hasZ se establecerá en false.
El punto 0 para los ángulos x e y se define cuando los ejes x e y del dispositivo están orientados hacia el horizonte. Este es un ejemplo de cómo cambiará el valor x con el movimiento del dispositivo.
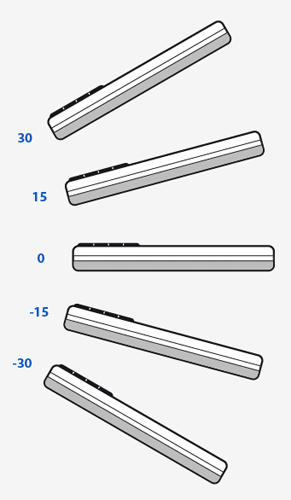
Este es un ejemplo de cómo cambiará el valor de y con el movimiento del dispositivo.
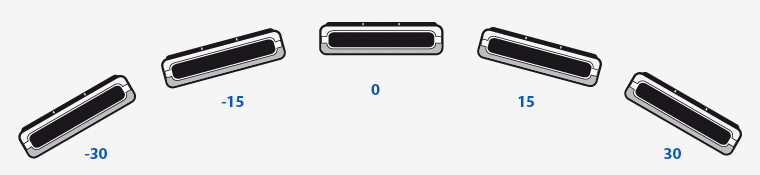
Tenga en cuenta que cuando x es 90 o -90, los valores para z e y consiguen la rotación alrededor del mismo eje (debido al orden de las operaciones). En este caso la rotación de y será 0.
Documentación de propiedades
[read-only] x : qreal
Esta propiedad contiene la rotación alrededor del eje x.
Se mide en grados.
Funciones de acceso:
| qreal | x() const |
Véase también QRotationReading Units.
[read-only] y : qreal
Esta propiedad contiene la rotación alrededor del eje y.
Se mide en grados.
Funciones de acceso:
| qreal | y() const |
Véase también QRotationReading Units.
[read-only] z : qreal
Esta propiedad mantiene la rotación alrededor del eje z.
Se mide en grados.
Funciones de acceso:
| qreal | z() const |
Véase también QRotationReading Units.
Documentación de las funciones miembro
void QRotationReading::setFromEuler(qreal x, qreal y, qreal z)
Establece la rotación a partir de tres ángulos de Euler.
Esto debe ser llamado desde el backend.
Los ángulos se miden en grados. El orden de las rotaciones importa, ya que primero se aplica la rotación z, luego la rotación x y finalmente la rotación y.
© 2026 The Qt Company Ltd. Documentation contributions included herein are the copyrights of their respective owners. The documentation provided herein is licensed under the terms of the GNU Free Documentation License version 1.3 as published by the Free Software Foundation. Qt and respective logos are trademarks of The Qt Company Ltd. in Finland and/or other countries worldwide. All other trademarks are property of their respective owners.
