Qt Quick Física 3D - Ejemplo de formas compuestas
Demuestra el uso de formas de colisión complejas.

Este ejemplo demuestra cómo utilizar más de una forma de colisión para crear objetos complejos para la detección de colisiones. La escena consiste en un plano estático verde y una serie de enlaces conectados entre sí. Al principio, la simulación está desactivada. Después de algún tiempo o cuando el usuario pulse la tecla espacio, la simulación se iniciará. Se iniciará una animación que hace que los eslabones situados más a la izquierda y más a la derecha se muevan horizontalmente hacia delante y hacia atrás.
Configurar
Como de costumbre necesitamos agregar nuestro PhysicsWorld:
PhysicsWorld { id: physicsWorld enableCCD: true maximumTimestep: 20 scene: viewport.scene }
Hacemos la configuración habitual donde tenemos un entorno, cámara y luces:
environment: SceneEnvironment { antialiasingMode: SceneEnvironment.MSAA backgroundMode: SceneEnvironment.Color clearColor: "lightblue" } focus: true PerspectiveCamera { id: camera position: Qt.vector3d(0, 900, 1500) eulerRotation: Qt.vector3d(-10, 0, 0) clipFar: 15500 clipNear: 1 } DirectionalLight { eulerRotation.x: -45 eulerRotation.y: 45 castsShadow: true brightness: 1.5 shadowMapQuality: Light.ShadowMapQualityHigh }
Objetos físicos
Tenemos nuestro plano estático normal:
StaticRigidBody { position: Qt.vector3d(0, -100, 0) eulerRotation: Qt.vector3d(-90, 0, 0) collisionShapes: PlaneShape {} Model { source: "#Rectangle" scale: Qt.vector3d(500, 500, 1) materials: PrincipledMaterial { baseColor: "green" } castsShadows: false receivesShadows: true } }
Luego hacemos instancias de nuestros enlaces.
MeshLink { id: leftLink isKinematic: true property vector3d startPos: Qt.vector3d(-6 * viewport.ringDistance, viewport.ringY, 0) property vector3d startRot: Qt.vector3d(90, 0, 0) kinematicPosition: startPos position: startPos kinematicEulerRotation: startRot eulerRotation: startRot color: "red" } CapsuleLink { position: Qt.vector3d(-5 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(90, 0, 0) } MeshLink { position: Qt.vector3d(-4 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(90, 0, 0) } MeshLink { position: Qt.vector3d(-3 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(0, 90, 0) } MeshLink { position: Qt.vector3d(-2 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(90, 0, 0) } MeshLink { position: Qt.vector3d(-1 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(0, 90, 0) } CapsuleLink { position: Qt.vector3d(0, viewport.ringY, 0) } MeshLink { position: Qt.vector3d(1 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(0, 90, 0) } MeshLink { position: Qt.vector3d(2 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(90, 0, 0) } MeshLink { position: Qt.vector3d(3 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(0, 90, 0) } MeshLink { position: Qt.vector3d(4 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(90, 0, 0) } CapsuleLink { position: Qt.vector3d(5 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(90, 0, 0) } MeshLink { id: rightLink isKinematic: true property vector3d startPos: Qt.vector3d(6 * viewport.ringDistance, viewport.ringY, 0) property vector3d startRot: Qt.vector3d(90, 0, 0) kinematicPosition: startPos position: startPos kinematicEulerRotation: startRot eulerRotation: startRot color: "red" }
El primer enlace que está a la izquierda tiene su propiedad isKinematic establecida a true para que podamos controlarlo mediante animación. Como se trata de un objeto cinemático necesitamos establecer las propiedades kinematicPosition y kinematicRotation. Lo animamos animando la propiedad kinematicPosition. Los otros enlaces son instanciados con algún espacio entre ellos.
Para obtener una animación suave que siga exactamente la simulación física utilizamos un AnimationController que conectamos a la señal onFrameDone en el PhysicsWorld. De esta manera, si hubiera alguna caída de fotogramas que ralentizara la simulación, la animación se ralentizará en consecuencia. Usamos un SequentialAnimation con cuatro NumberAnimation para mover los anillos de la izquierda y la derecha hacia adelante y hacia atrás. Este es el código QML para la animación:
Connections { target: physicsWorld property real totalAnimationTime: 12000 function onFrameDone(timeStep) { let progressStep = timeStep / totalAnimationTime animationController.progress += progressStep if (animationController.progress >= 1) { animationController.completeToEnd() animationController.reload() animationController.progress = 0 } } } AnimationController { id: animationController animation: SequentialAnimation { NumberAnimation { target: leftLink property: "kinematicPosition.x" to: 3 * viewport.ringDistance from: -6 * viewport.ringDistance easing.type: Easing.InOutCubic duration: 1000 } NumberAnimation { target: leftLink property: "kinematicPosition.x" from: 3 * viewport.ringDistance to: -6 * viewport.ringDistance easing.type: Easing.InOutCubic duration: 1000 } NumberAnimation { target: rightLink property: "kinematicPosition.x" to: -3 * viewport.ringDistance from: 6 * viewport.ringDistance easing.type: Easing.InOutCubic duration: 1000 } NumberAnimation { target: rightLink property: "kinematicPosition.x" from: -3 * viewport.ringDistance to: 6 * viewport.ringDistance easing.type: Easing.InOutCubic duration: 1000 } } }
La parte interesante es lo que sucede dentro de los archivos Mesh y Capsule Links. Echemos un vistazo a cada uno de ellos.
Enlace Malla
DynamicRigidBody { scale: Qt.vector3d(100, 100, 100) property color color: "white" PrincipledMaterial { id: _material baseColor: color metalness: 1.0 roughness: 0.5 } Model { source: "meshes/ring.mesh" materials: [_material] } collisionShapes: [ ConvexMeshShape { source: "meshes/segmentedRing_001.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_002.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_003.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_004.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_005.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_006.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_007.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_008.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_009.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_010.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_011.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_012.mesh" } ] }
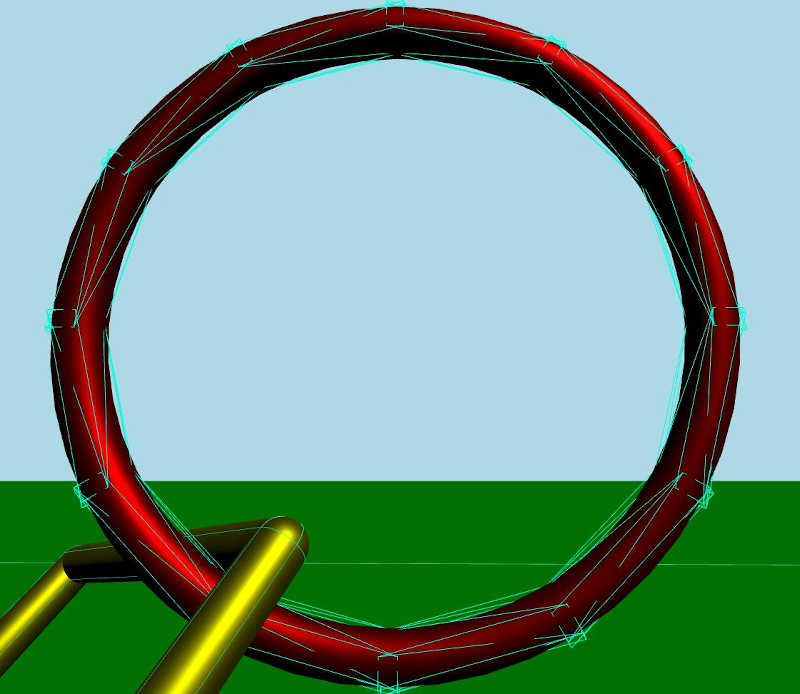
El Mesh Link es un Cuerpo Rígido Dinámico con un modelo y un material. El modelo carga la malla desde un archivo de malla. También tenemos una lista de formas de colisión que juntas se combinan y forman una forma compuesta para la detección de colisiones. Cada forma es una forma de Malla Convexa que carga la malla desde un archivo fuente. Una forma convexa es básicamente una forma donde la línea entre dos puntos cualquiera dentro de la forma está siempre dentro de la forma.
Si echamos un vistazo más de cerca cuando el modo de depuración está activado, así es como las formas de colisión forman la forma de colisión compuesta:
Cápsula Enlace
DynamicRigidBody { property real len: 170 property real w: 17 PrincipledMaterial { id: material3 baseColor: "yellow" metalness: 1.0 roughness: 0.5 } Node { opacity: 1 Model { materials: material3 source: "#Cylinder" scale: Qt.vector3d(w / 100, len / 100, w / 100) eulerRotation.z: 90 y: -len / 2 } Model { materials: material3 source: "#Cylinder" scale: Qt.vector3d(w / 100, len / 100, w / 100) eulerRotation.z: 90 y: len / 2 } Model { materials: material3 source: "#Cylinder" scale: Qt.vector3d(w / 100, len / 100, w / 100) x: len / 2 } Model { materials: material3 source: "#Cylinder" scale: Qt.vector3d(w / 100, len / 100, w / 100) x: -len / 2 } Model { materials: material3 source: "#Sphere" scale: Qt.vector3d(w / 100, w / 100, w / 100) x: -len / 2 y: -len / 2 } Model { materials: material3 source: "#Sphere" scale: Qt.vector3d(w / 100, w / 100, w / 100) x: -len / 2 y: len / 2 } Model { materials: material3 source: "#Sphere" scale: Qt.vector3d(w / 100, w / 100, w / 100) x: len / 2 y: -len / 2 } Model { materials: material3 source: "#Sphere" scale: Qt.vector3d(w / 100, w / 100, w / 100) x: len / 2 y: len / 2 } } collisionShapes: [ CapsuleShape { y: -len / 2 height: len diameter: w }, CapsuleShape { y: len / 2 height: len diameter: w }, CapsuleShape { x: -len / 2 eulerRotation.z: 90 height: len diameter: w }, CapsuleShape { x: len / 2 eulerRotation.z: 90 height: len diameter: w } ] }
El Eslabón Cápsula es un Cuerpo Rígido Dinámico con algunos modelos que comparten el mismo material. Este enlace está formado por varios cilindros y esferas. Al igual que el Eslabón Malla tenemos una lista de formas de colisión. Esta vez cada forma es una Forma Cápsula.
Si echamos un vistazo más de cerca cuando el modo de depuración está activado, así es como las formas de colisión forman la forma de colisión compuesta.

Archivos:
© 2026 The Qt Company Ltd. Documentation contributions included herein are the copyrights of their respective owners. The documentation provided herein is licensed under the terms of the GNU Free Documentation License version 1.3 as published by the Free Software Foundation. Qt and respective logos are trademarks of The Qt Company Ltd. in Finland and/or other countries worldwide. All other trademarks are property of their respective owners.
