Client Modbus
L'exemple met en œuvre une application client Modbus.
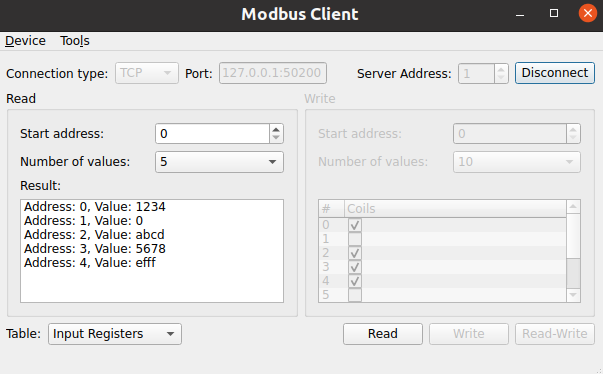
L'exemple agit comme un client Modbus qui envoie des requêtes Modbus via la ligne série ou TCP. La boîte de dialogue affichée permet de définir des requêtes standard et d'afficher les réponses entrantes.
L'exemple doit être utilisé en conjonction avec l'exemple du serveur Modbus ou avec un autre dispositif Modbus connecté via TCP ou le port série.
Classes clés utilisées dans cet exemple :
Création d'un QModbusClient
Une instance de QModbusClient est nécessaire pour effectuer toute communication. En fonction du type de connexion spécifié, l'exemple peut instancier un QModbusRtuSerialClient (pour une communication série) ou un QModbusTcpClient (pour une communication basée sur TCP).
auto type = static_cast<ModbusConnection>(index); if (type == Serial) { #if QT_CONFIG(modbus_serialport) modbusDevice = new QModbusRtuSerialClient(this); // Try to fill in the first available serial port name if the line edit // is empty, or contains a url (assume that ':' is only a part of url). const auto ports = QSerialPortInfo::availablePorts(); const auto currentText = ui->portEdit->text(); if (!ports.isEmpty() && (currentText.isEmpty() || currentText.contains(u':'))) ui->portEdit->setText(ports.front().portName()); #endif } else if (type == Tcp) { modbusDevice = new QModbusTcpClient(this); const QUrl currentUrl = QUrl::fromUserInput(ui->portEdit->text()); // Check if we already have <ip address>:<port> if (currentUrl.port() <= 0) ui->portEdit->setText(QLatin1String("127.0.0.1:50200")); }
Une fois le client créé, utilisez la méthode setConnectionParameter() pour spécifier les paramètres de connexion. Les paramètres varient en fonction du type de communication :
const auto settings = m_settingsDialog->settings(); if (static_cast<ModbusConnection>(ui->connectType->currentIndex()) == Serial) { modbusDevice->setConnectionParameter(QModbusDevice::SerialPortNameParameter, ui->portEdit->text()); #if QT_CONFIG(modbus_serialport) modbusDevice->setConnectionParameter(QModbusDevice::SerialParityParameter, settings.parity); modbusDevice->setConnectionParameter(QModbusDevice::SerialBaudRateParameter, settings.baud); modbusDevice->setConnectionParameter(QModbusDevice::SerialDataBitsParameter, settings.dataBits); modbusDevice->setConnectionParameter(QModbusDevice::SerialStopBitsParameter, settings.stopBits); #endif } else { const QUrl url = QUrl::fromUserInput(ui->portEdit->text()); modbusDevice->setConnectionParameter(QModbusDevice::NetworkPortParameter, url.port()); modbusDevice->setConnectionParameter(QModbusDevice::NetworkAddressParameter, url.host()); } modbusDevice->setTimeout(settings.responseTime); modbusDevice->setNumberOfRetries(settings.numberOfRetries);
Une fois le client créé et tous les paramètres spécifiés, utilisez la méthode QModbusClient::connectDevice() pour vous connecter au réseau Modbus.
Lecture des données
Pour lire les données du serveur Modbus, le client doit spécifier une adresse de serveur et les paramètres des objets qu'il souhaite lire :
Les paramètres des objets sont représentés par la classe QModbusDataUnit:
QModbusDataUnit MainWindow::readRequest() const { const auto table = ui->writeTable->currentData().value<QModbusDataUnit::RegisterType>(); int startAddress = ui->readAddress->value(); Q_ASSERT(startAddress >= 0 && startAddress < 10); // do not go beyond 10 entries quint16 numberOfEntries = qMin(ui->readSize->currentText().toUShort(), quint16(10 - startAddress)); return QModbusDataUnit(table, startAddress, numberOfEntries); }
Une fois les paramètres collectés, la méthode sendReadRequest() est utilisée pour envoyer la requête proprement dite. La méthode renvoie un QModbusReply qui doit être traité de manière asynchrone, de sorte que le signal QModbusReply::finished() est utilisé pour vérifier si la réponse est prête.
if (auto *reply = modbusDevice->sendReadRequest(readRequest(), ui->serverEdit->value())) { if (!reply->isFinished()) connect(reply, &QModbusReply::finished, this, &MainWindow::onReadReady); else delete reply; // broadcast replies return immediately } else { statusBar()->showMessage(tr("Read error: %1").arg(modbusDevice->errorString()), 5000); }
Une fois le signal QModbusReply::finished() reçu, l'objet de réponse peut être utilisé pour obtenir les données ou pour vérifier les erreurs de lecture :
void MainWindow::onReadReady() { auto reply = qobject_cast<QModbusReply *>(sender()); if (!reply) return; if (reply->error() == QModbusDevice::NoError) { const QModbusDataUnit unit = reply->result(); for (qsizetype i = 0, total = unit.valueCount(); i < total; ++i) { const QString entry = tr("Address: %1, Value: %2").arg(unit.startAddress() + i) .arg(QString::number(unit.value(i), unit.registerType() <= QModbusDataUnit::Coils ? 10 : 16)); ui->readValue->addItem(entry); } } else if (reply->error() == QModbusDevice::ProtocolError) { statusBar()->showMessage(tr("Read response error: %1 (Modbus exception: 0x%2)"). arg(reply->errorString()). arg(reply->rawResult().exceptionCode(), -1, 16), 5000); } else { statusBar()->showMessage(tr("Read response error: %1 (code: 0x%2)"). arg(reply->errorString()). arg(reply->error(), -1, 16), 5000); } reply->deleteLater(); }
Écriture des données
Pour écrire les données au serveur Modbus, le client doit spécifier l'adresse du serveur et les paramètres des objets qu'il souhaite écrire. Comme pour la lecture des données, la classe QModbusDataUnit est utilisée pour représenter les informations sur les données à écrire. Cette fois-ci, les données comprennent également l'objet souhaité values. La méthode sendWriteRequest() est utilisée pour écrire les données souhaitées :
QModbusDataUnit writeUnit = writeRequest(); QModbusDataUnit::RegisterType table = writeUnit.registerType(); for (qsizetype i = 0, total = writeUnit.valueCount(); i < total; ++i) { const auto addr = i + writeUnit.startAddress(); if (table == QModbusDataUnit::Coils) writeUnit.setValue(i, writeModel->m_coils[addr]); else writeUnit.setValue(i, writeModel->m_holdingRegisters[addr]); } if (auto *reply = modbusDevice->sendWriteRequest(writeUnit, ui->serverEdit->value())) { if (!reply->isFinished()) { connect(reply, &QModbusReply::finished, this, [this, reply]() { const auto error = reply->error(); if (error == QModbusDevice::ProtocolError) { statusBar()->showMessage(tr("Write response error: %1 (Modbus exception: 0x%2)") .arg(reply->errorString()).arg(reply->rawResult().exceptionCode(), -1, 16), 5000); } else if (error != QModbusDevice::NoError) { statusBar()->showMessage(tr("Write response error: %1 (code: 0x%2)"). arg(reply->errorString()).arg(error, -1, 16), 5000); } reply->deleteLater(); }); } else { // broadcast replies return immediately reply->deleteLater(); } } else { statusBar()->showMessage(tr("Write error: %1").arg(modbusDevice->errorString()), 5000); }
Comme pour la lecture des données, l'objet QModbusReply renvoyé est utilisé pour vérifier les erreurs d'écriture.
Exécution de l'exemple
Pour exécuter l'exemple à partir de Qt Creatorouvrez le mode Welcome et sélectionnez l'exemple à partir de Examples. Pour plus d'informations, voir Qt Creator: Tutoriel : Construire et exécuter.
© 2026 The Qt Company Ltd. Documentation contributions included herein are the copyrights of their respective owners. The documentation provided herein is licensed under the terms of the GNU Free Documentation License version 1.3 as published by the Free Software Foundation. Qt and respective logos are trademarks of The Qt Company Ltd. in Finland and/or other countries worldwide. All other trademarks are property of their respective owners.
