Qt Quick Physique 3D - Exemple de formes composées
Démonstration de l'utilisation de formes de collision complexes.

Cet exemple montre comment utiliser plus d'une forme de collision pour créer des objets complexes pour la détection des collisions. La scène se compose d'un plan statique vert et d'une série de liens connectés les uns aux autres. Au début, la simulation est désactivée. Après un certain temps ou lorsque l'utilisateur appuie sur la touche espace, la simulation démarre. Une animation démarre et provoque le déplacement horizontal des liens les plus à gauche et les plus à droite, d'avant en arrière.
Configuration
Comme d'habitude, nous devons ajouter notre site PhysicsWorld:
PhysicsWorld { id: physicsWorld enableCCD: true maximumTimestep: 20 scene: viewport.scene }
Nous procédons à l'installation habituelle d'un environnement, d'une caméra et de lumières :
environment: SceneEnvironment { antialiasingMode: SceneEnvironment.MSAA backgroundMode: SceneEnvironment.Color clearColor: "lightblue" } focus: true PerspectiveCamera { id: camera position: Qt.vector3d(0, 900, 1500) eulerRotation: Qt.vector3d(-10, 0, 0) clipFar: 15500 clipNear: 1 } DirectionalLight { eulerRotation.x: -45 eulerRotation.y: 45 castsShadow: true brightness: 1.5 shadowMapQuality: Light.ShadowMapQualityHigh }
Objets physiques
Nous avons notre plan statique régulier :
StaticRigidBody { position: Qt.vector3d(0, -100, 0) eulerRotation: Qt.vector3d(-90, 0, 0) collisionShapes: PlaneShape {} Model { source: "#Rectangle" scale: Qt.vector3d(500, 500, 1) materials: PrincipledMaterial { baseColor: "green" } castsShadows: false receivesShadows: true } }
Ensuite, nous créons des instances de nos liens.
MeshLink { id: leftLink isKinematic: true property vector3d startPos: Qt.vector3d(-6 * viewport.ringDistance, viewport.ringY, 0) property vector3d startRot: Qt.vector3d(90, 0, 0) kinematicPosition: startPos position: startPos kinematicEulerRotation: startRot eulerRotation: startRot color: "red" } CapsuleLink { position: Qt.vector3d(-5 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(90, 0, 0) } MeshLink { position: Qt.vector3d(-4 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(90, 0, 0) } MeshLink { position: Qt.vector3d(-3 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(0, 90, 0) } MeshLink { position: Qt.vector3d(-2 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(90, 0, 0) } MeshLink { position: Qt.vector3d(-1 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(0, 90, 0) } CapsuleLink { position: Qt.vector3d(0, viewport.ringY, 0) } MeshLink { position: Qt.vector3d(1 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(0, 90, 0) } MeshLink { position: Qt.vector3d(2 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(90, 0, 0) } MeshLink { position: Qt.vector3d(3 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(0, 90, 0) } MeshLink { position: Qt.vector3d(4 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(90, 0, 0) } CapsuleLink { position: Qt.vector3d(5 * viewport.ringDistance, viewport.ringY, 0) eulerRotation: Qt.vector3d(90, 0, 0) } MeshLink { id: rightLink isKinematic: true property vector3d startPos: Qt.vector3d(6 * viewport.ringDistance, viewport.ringY, 0) property vector3d startRot: Qt.vector3d(90, 0, 0) kinematicPosition: startPos position: startPos kinematicEulerRotation: startRot eulerRotation: startRot color: "red" }
Le premier lien, à gauche, a sa propriété isKinematic réglée sur true afin que nous puissions le contrôler par le biais de l'animation. Comme il s'agit d'un objet cinématique, nous devons définir les propriétés kinematicPosition et kinematicRotation. Nous l'animons en animant la propriété kinematicPosition. Les autres liens sont instanciés avec un certain espacement entre eux.
Pour obtenir une animation fluide qui suive exactement la simulation physique, nous utilisons un AnimationController que nous connectons au signal onFrameDone sur le PhysicsWorld. De cette façon, s'il devait y avoir des chutes d'images ralentissant la simulation, l'animation serait ralentie en conséquence. Nous utilisons un SequentialAnimation avec quatre NumberAnimation pour déplacer les anneaux les plus à gauche et les plus à droite d'avant en arrière. Voici le code QML de l'animation :
Connections { target: physicsWorld property real totalAnimationTime: 12000 function onFrameDone(timeStep) { let progressStep = timeStep / totalAnimationTime animationController.progress += progressStep if (animationController.progress >= 1) { animationController.completeToEnd() animationController.reload() animationController.progress = 0 } } } AnimationController { id: animationController animation: SequentialAnimation { NumberAnimation { target: leftLink property: "kinematicPosition.x" to: 3 * viewport.ringDistance from: -6 * viewport.ringDistance easing.type: Easing.InOutCubic duration: 1000 } NumberAnimation { target: leftLink property: "kinematicPosition.x" from: 3 * viewport.ringDistance to: -6 * viewport.ringDistance easing.type: Easing.InOutCubic duration: 1000 } NumberAnimation { target: rightLink property: "kinematicPosition.x" to: -3 * viewport.ringDistance from: 6 * viewport.ringDistance easing.type: Easing.InOutCubic duration: 1000 } NumberAnimation { target: rightLink property: "kinematicPosition.x" from: -3 * viewport.ringDistance to: 6 * viewport.ringDistance easing.type: Easing.InOutCubic duration: 1000 } } }
La partie intéressante est ce qui se passe à l'intérieur des fichiers Mesh et Capsule Links. Jetons un coup d'œil à chacun d'entre eux.
Lien Mesh
DynamicRigidBody { scale: Qt.vector3d(100, 100, 100) property color color: "white" PrincipledMaterial { id: _material baseColor: color metalness: 1.0 roughness: 0.5 } Model { source: "meshes/ring.mesh" materials: [_material] } collisionShapes: [ ConvexMeshShape { source: "meshes/segmentedRing_001.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_002.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_003.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_004.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_005.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_006.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_007.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_008.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_009.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_010.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_011.mesh" }, ConvexMeshShape { source: "meshes/segmentedRing_012.mesh" } ] }
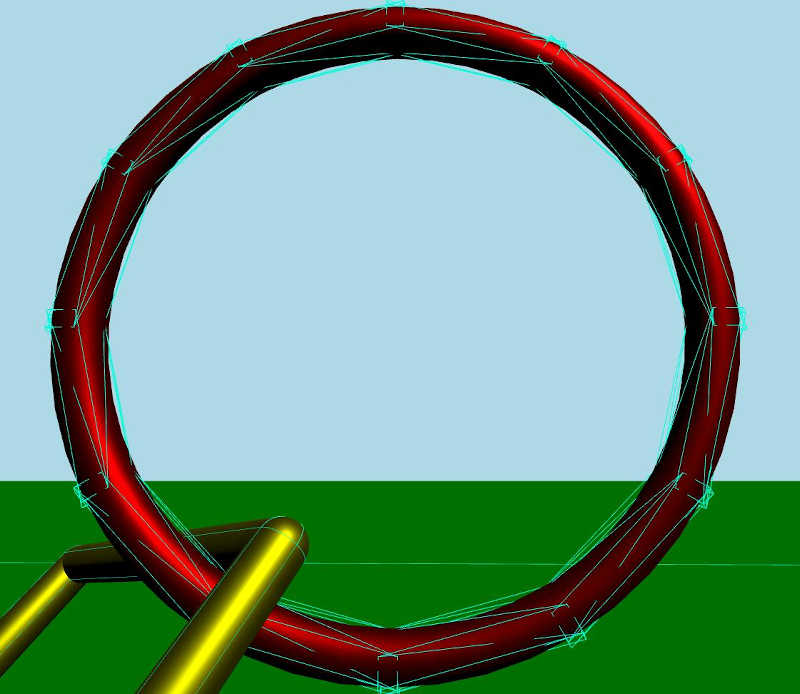
Le Mesh Link est un Dynamic Rigid Body avec un modèle et un matériau. Le modèle charge le maillage à partir d'un fichier de maillage. Nous disposons également d'une liste de formes de collision qui sont combinées et forment une forme composée pour la détection des collisions. Chaque forme est une forme de maillage convexe qui charge le maillage à partir d'un fichier source. Une forme convexe est une forme où la ligne entre deux points de la forme est toujours à l'intérieur de la forme.
Si nous regardons de plus près lorsque le mode de débogage est activé, voici comment les formes de collision forment la forme de collision composée :
Capsule Lien
DynamicRigidBody { property real len: 170 property real w: 17 PrincipledMaterial { id: material3 baseColor: "yellow" metalness: 1.0 roughness: 0.5 } Node { opacity: 1 Model { materials: material3 source: "#Cylinder" scale: Qt.vector3d(w / 100, len / 100, w / 100) eulerRotation.z: 90 y: -len / 2 } Model { materials: material3 source: "#Cylinder" scale: Qt.vector3d(w / 100, len / 100, w / 100) eulerRotation.z: 90 y: len / 2 } Model { materials: material3 source: "#Cylinder" scale: Qt.vector3d(w / 100, len / 100, w / 100) x: len / 2 } Model { materials: material3 source: "#Cylinder" scale: Qt.vector3d(w / 100, len / 100, w / 100) x: -len / 2 } Model { materials: material3 source: "#Sphere" scale: Qt.vector3d(w / 100, w / 100, w / 100) x: -len / 2 y: -len / 2 } Model { materials: material3 source: "#Sphere" scale: Qt.vector3d(w / 100, w / 100, w / 100) x: -len / 2 y: len / 2 } Model { materials: material3 source: "#Sphere" scale: Qt.vector3d(w / 100, w / 100, w / 100) x: len / 2 y: -len / 2 } Model { materials: material3 source: "#Sphere" scale: Qt.vector3d(w / 100, w / 100, w / 100) x: len / 2 y: len / 2 } } collisionShapes: [ CapsuleShape { y: -len / 2 height: len diameter: w }, CapsuleShape { y: len / 2 height: len diameter: w }, CapsuleShape { x: -len / 2 eulerRotation.z: 90 height: len diameter: w }, CapsuleShape { x: len / 2 eulerRotation.z: 90 height: len diameter: w } ] }
Le lien de la capsule est un corps rigide dynamique dont certains modèles partagent le même matériau. Ce lien est formé de plusieurs cylindres et sphères. Comme pour le lien de maillage, nous disposons d'une liste de formes de collision. Cette fois, chaque forme est une Capsule Shape.
Si nous regardons de plus près lorsque le mode debug est activé, voici comment les formes de collision forment la forme de collision composée.

Fichiers :
© 2026 The Qt Company Ltd. Documentation contributions included herein are the copyrights of their respective owners. The documentation provided herein is licensed under the terms of the GNU Free Documentation License version 1.3 as published by the Free Software Foundation. Qt and respective logos are trademarks of The Qt Company Ltd. in Finland and/or other countries worldwide. All other trademarks are property of their respective owners.
