QRotationReading Class
QRotationReadingクラスは、回転センサーからの1つの読み取り値を表します。詳細...
| ヘッダー | #include <QRotationReading> |
| CMake: | find_package(Qt6 REQUIRED COMPONENTS Sensors)target_link_libraries(mytarget PRIVATE Qt6::Sensors) |
| qmake: | QT += sensors |
| 継承: | QSensorReading |
プロパティ
パブリック機能
| void | setFromEuler(qreal x, qreal y, qreal z) |
| qreal | x() const |
| qreal | y() const |
| qreal | z() const |
詳細説明
Q回転読み取りユニット
回転読み取り値には、3次元空間におけるデバイスの向きを定義する、度単位で測定された3つの角度が含まれます。これらの角度はヨー、ピッチ、ロールに似ていますが、右手直交座標系で定義された軸を持つ右手回転のみを使用して定義されます。
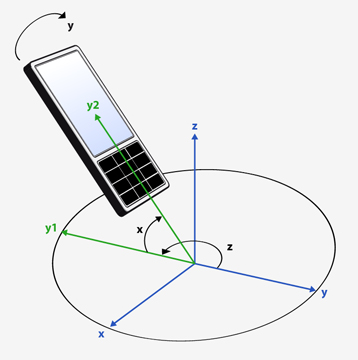
3つの角度は以下の順序でデバイスに適用される。
- 右回転 z(-180, 180)。y軸から始まり、反時計回りにインクリメントされる。
- 右回転 x [-90, 90]。新しい(一度回転した)y軸から開始し、z軸に向かってインクリメントする。
- 右回転 y (-180, 180)。新しい(2回回転させた)z軸から開始し、x軸に向かってインクリメントする。
以下は、角度の適用順序を示す視覚化である。
z角度の0点は、固定された外部エンティティとして定義され、デバイス固有です。通常、磁北がこの基準点として使用されますが、そうでない場合もあります。z 角度の値をデバイス間で比較したり、同じデバイスであってもかなりの距離を移動している場合は比較しないでくださ い。
デバイスが固定された外部エンティティを検出できない場合、z角は常に0になり、QRotationSensor::hasZ プロパティはfalseに設定されます。
x 角度と y 角度の 0 ポイントは、デバイスの x 軸と y 軸が地平線を向いているときと定義されます。以下は、デバイスの移動によって x 値がどのように変化するかの例です。
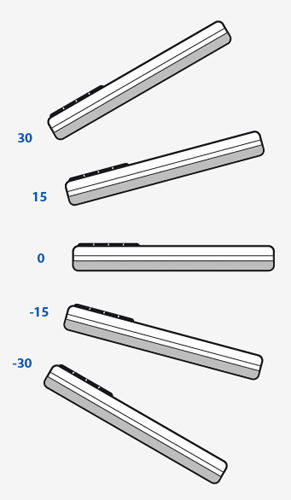
以下は、デバイスの移動によってy値がどのように変化するかの例です。
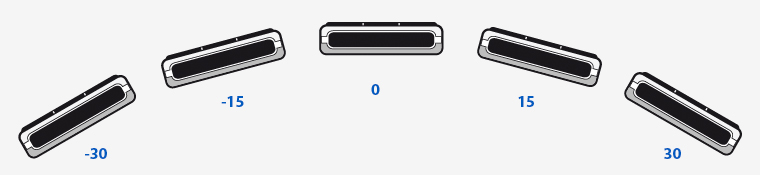
xが90または-90の場合、zとyの値は同じ軸を中心に回転することに注意してください(操作の順序による)。この場合、yの回転は0になります。
プロパティのドキュメント
[read-only] x : qreal
このプロパティは、X軸周りの回転を保持する。
度として測定される。
アクセス関数:
| qreal | x() const |
QRotationReading Unitsも参照してください 。
[read-only] y : qreal
このプロパティは、Y軸周りの回転を保持する。
度として測定される。
アクセス関数:
| qreal | y() const |
QRotationReading Unitsも参照してください 。
[read-only] z : qreal
このプロパティは、z 軸周りの回転を保持する。
度として測定される。
アクセス関数:
| qreal | z() const |
© 2026 The Qt Company Ltd. Documentation contributions included herein are the copyrights of their respective owners. The documentation provided herein is licensed under the terms of the GNU Free Documentation License version 1.3 as published by the Free Software Foundation. Qt and respective logos are trademarks of The Qt Company Ltd. in Finland and/or other countries worldwide. All other trademarks are property of their respective owners.
