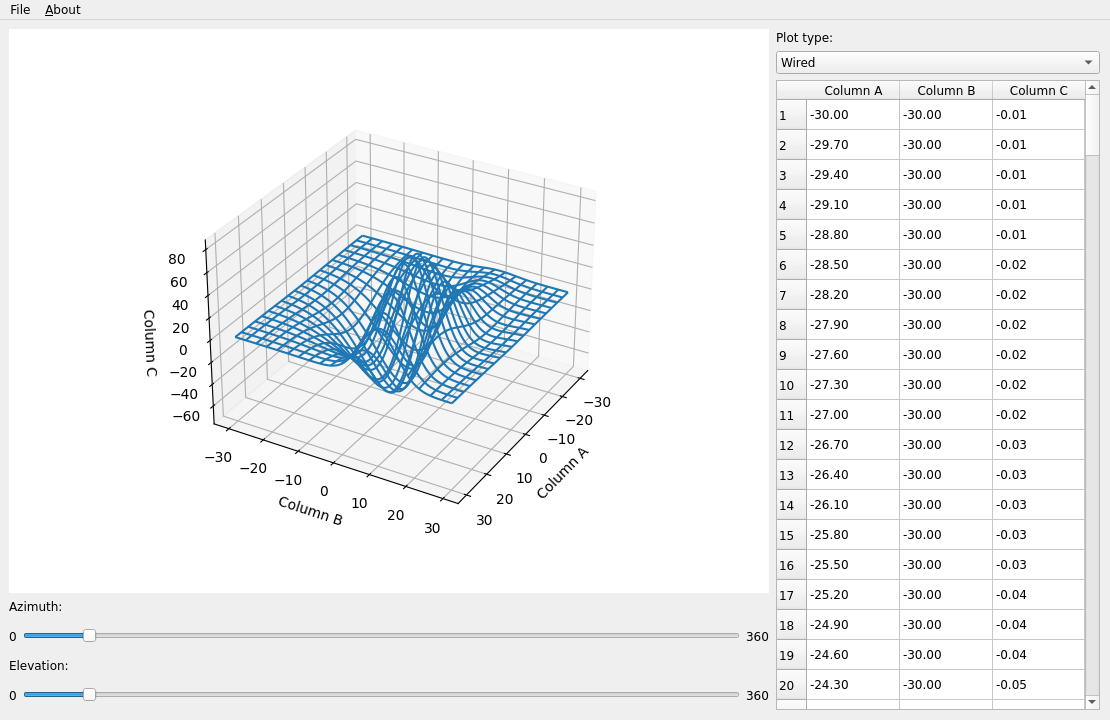
Matplotlib Widget 3D Example¶
A Python application that demonstrates how to combine matplotlib with Qt Widget-based functionality.
# Copyright (C) 2022 The Qt Company Ltd.
# SPDX-License-Identifier: LicenseRef-Qt-Commercial OR BSD-3-Clause
from __future__ import annotations
import sys
import numpy as np
from matplotlib.backends.backend_qtagg import FigureCanvas
from matplotlib.figure import Figure
from mpl_toolkits.mplot3d import axes3d
from PySide6.QtCore import Qt, Slot
from PySide6.QtGui import QAction, QKeySequence
from PySide6.QtWidgets import (QApplication, QComboBox, QHBoxLayout,
QHeaderView, QLabel, QMainWindow, QSlider,
QTableWidget, QTableWidgetItem, QVBoxLayout,
QWidget)
"""This example implements the interaction between Qt Widgets and a 3D
matplotlib plot"""
class ApplicationWindow(QMainWindow):
def __init__(self, parent=None):
QMainWindow.__init__(self, parent)
self.column_names = ["Column A", "Column B", "Column C"]
# Central widget
self._main = QWidget()
self.setCentralWidget(self._main)
# Main menu bar
self.menu = self.menuBar()
self.menu_file = self.menu.addMenu("File")
exit = QAction("Exit", self, triggered=qApp.quit) # noqa: F821
self.menu_file.addAction(exit)
self.menu_about = self.menu.addMenu("&About")
about = QAction("About Qt", self,
shortcut=QKeySequence(QKeySequence.StandardKey.HelpContents),
triggered=qApp.aboutQt) # noqa: F821
self.menu_about.addAction(about)
# Figure (Left)
self.fig = Figure(figsize=(5, 3))
self.canvas = FigureCanvas(self.fig)
# Sliders (Left)
min = 0
max = 360
self.slider_azim = QSlider(minimum=min, maximum=max, orientation=Qt.Orientation.Horizontal)
self.slider_elev = QSlider(minimum=min, maximum=max, orientation=Qt.Orientation.Horizontal)
self.slider_azim_layout = QHBoxLayout()
self.slider_azim_layout.addWidget(QLabel(f"{min}"))
self.slider_azim_layout.addWidget(self.slider_azim)
self.slider_azim_layout.addWidget(QLabel(f"{max}"))
self.slider_elev_layout = QHBoxLayout()
self.slider_elev_layout.addWidget(QLabel(f"{min}"))
self.slider_elev_layout.addWidget(self.slider_elev)
self.slider_elev_layout.addWidget(QLabel(f"{max}"))
# Table (Right)
self.table = QTableWidget()
header = self.table.horizontalHeader()
header.setSectionResizeMode(QHeaderView.ResizeMode.Stretch)
# ComboBox (Right)
self.combo = QComboBox()
self.combo.addItems(["Wired", "Surface", "Triangular Surface", "Sphere"])
# Right layout
rlayout = QVBoxLayout()
rlayout.setContentsMargins(1, 1, 1, 1)
rlayout.addWidget(QLabel("Plot type:"))
rlayout.addWidget(self.combo)
rlayout.addWidget(self.table)
# Left layout
llayout = QVBoxLayout()
rlayout.setContentsMargins(1, 1, 1, 1)
llayout.addWidget(self.canvas, 88)
llayout.addWidget(QLabel("Azimuth:"), 1)
llayout.addLayout(self.slider_azim_layout, 5)
llayout.addWidget(QLabel("Elevation:"), 1)
llayout.addLayout(self.slider_elev_layout, 5)
# Main layout
layout = QHBoxLayout(self._main)
layout.addLayout(llayout, 70)
layout.addLayout(rlayout, 30)
# Signal and Slots connections
self.combo.currentTextChanged.connect(self.combo_option)
self.slider_azim.valueChanged.connect(self.rotate_azim)
self.slider_elev.valueChanged.connect(self.rotate_elev)
# Initial setup
self.plot_wire()
self._ax.view_init(30, 30)
self.slider_azim.setValue(30)
self.slider_elev.setValue(30)
self.fig.canvas.mpl_connect("button_release_event", self.on_click)
# Matplotlib slot method
def on_click(self, event):
azim, elev = self._ax.azim, self._ax.elev
self.slider_azim.setValue(azim + 180)
self.slider_elev.setValue(elev + 180)
# Utils methods
def set_table_data(self, X, Y, Z):
for i in range(len(X)):
self.table.setItem(i, 0, QTableWidgetItem(f"{X[i]:.2f}"))
self.table.setItem(i, 1, QTableWidgetItem(f"{Y[i]:.2f}"))
self.table.setItem(i, 2, QTableWidgetItem(f"{Z[i]:.2f}"))
def set_canvas_table_configuration(self, row_count, data):
self.fig.set_canvas(self.canvas)
self._ax = self.canvas.figure.add_subplot(projection="3d")
self._ax.set_xlabel(self.column_names[0])
self._ax.set_ylabel(self.column_names[1])
self._ax.set_zlabel(self.column_names[2])
self.table.setRowCount(row_count)
self.table.setColumnCount(3)
self.table.setHorizontalHeaderLabels(self.column_names)
self.set_table_data(data[0], data[1], data[2])
# Plot methods
def plot_wire(self):
# Data
self.X, self.Y, self.Z = axes3d.get_test_data(0.03)
self.set_canvas_table_configuration(len(self.X[0]), (self.X[0], self.Y[0], self.Z[0]))
self._ax.plot_wireframe(self.X, self.Y, self.Z, rstride=10, cstride=10, cmap="viridis")
self.canvas.draw()
def plot_surface(self):
# Data
self.X, self.Y = np.meshgrid(np.linspace(-6, 6, 30), np.linspace(-6, 6, 30))
self.Z = np.sin(np.sqrt(self.X ** 2 + self.Y ** 2))
self.set_canvas_table_configuration(len(self.X[0]), (self.X[0], self.Y[0], self.Z[0]))
self._ax.plot_surface(self.X, self.Y, self.Z,
rstride=1, cstride=1, cmap="viridis", edgecolor="none")
self.canvas.draw()
def plot_triangular_surface(self):
# Data
radii = np.linspace(0.125, 1.0, 8)
angles = np.linspace(0, 2 * np.pi, 36, endpoint=False)[..., np.newaxis]
self.X = np.append(0, (radii * np.cos(angles)).flatten())
self.Y = np.append(0, (radii * np.sin(angles)).flatten())
self.Z = np.sin(-self.X * self.Y)
self.set_canvas_table_configuration(len(self.X), (self.X, self.Y, self.Z))
self._ax.plot_trisurf(self.X, self.Y, self.Z, linewidth=0.2, antialiased=True)
self.canvas.draw()
def plot_sphere(self):
# Data
u = np.linspace(0, 2 * np.pi, 100)
v = np.linspace(0, np.pi, 100)
self.X = 10 * np.outer(np.cos(u), np.sin(v))
self.Y = 10 * np.outer(np.sin(u), np.sin(v))
self.Z = 9 * np.outer(np.ones(np.size(u)), np.cos(v))
self.set_canvas_table_configuration(len(self.X), (self.X[0], self.Y[0], self.Z[0]))
self._ax.plot_surface(self.X, self.Y, self.Z)
self.canvas.draw()
# Slots
@Slot()
def combo_option(self, text):
if text == "Wired":
self.plot_wire()
elif text == "Surface":
self.plot_surface()
elif text == "Triangular Surface":
self.plot_triangular_surface()
elif text == "Sphere":
self.plot_sphere()
@Slot()
def rotate_azim(self, value):
self._ax.view_init(self._ax.elev, value)
self.fig.set_canvas(self.canvas)
self.canvas.draw()
@Slot()
def rotate_elev(self, value):
self._ax.view_init(value, self._ax.azim)
self.fig.set_canvas(self.canvas)
self.canvas.draw()
if __name__ == "__main__":
app = QApplication(sys.argv)
w = ApplicationWindow()
w.setFixedSize(1280, 720)
w.show()
app.exec()