QGyroscopeReading Class
QGyroscopeReadingクラスは、ジャイロセンサーからの1つの読み取り値を表します。詳細...
| ヘッダー | #include <QGyroscopeReading> |
| CMake: | find_package(Qt6 REQUIRED COMPONENTS Sensors)target_link_libraries(mytarget PRIVATE Qt6::Sensors) |
| qmake: | QT += sensors |
| 継承: | QSensorReading |
プロパティ
パブリック機能
| void | setX(qreal x) |
| void | setY(qreal y) |
| void | setZ(qreal z) |
| qreal | x() const |
| qreal | y() const |
| qreal | z() const |
詳細説明
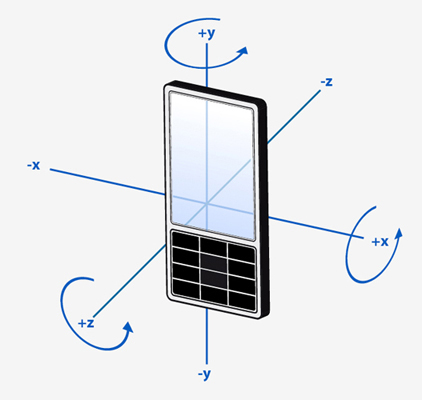
QGyroscopeReading 単位
読み取り値には3つの値が含まれ、1秒あたりの度数で測定され、x、y、z軸周りのデバイスの動きを定義します。QRotationReading とは異なり、固定された回転ではなく、現在の角速度を表します。測定単位は度/秒です。
プロパティの説明
[read-only] x : qreal
このプロパティは、X軸周りの角速度を保持する。
度/秒で測定される。
アクセス関数:
| qreal | x() const |
QGyroscopeReading Unitsも参照してください 。
[read-only] y : qreal
このプロパティは、Y軸周りの角速度を保持する。
度/秒で測定される。
アクセス関数:
| qreal | y() const |
QGyroscopeReading Unitsも参照してください 。
[read-only] z : qreal
このプロパティは、z軸周りの角速度を保持する。
度/秒で測定される。
アクセス関数:
| qreal | z() const |
© 2026 The Qt Company Ltd. Documentation contributions included herein are the copyrights of their respective owners. The documentation provided herein is licensed under the terms of the GNU Free Documentation License version 1.3 as published by the Free Software Foundation. Qt and respective logos are trademarks of The Qt Company Ltd. in Finland and/or other countries worldwide. All other trademarks are property of their respective owners.
