PySide6.QtSensors.QGyroscopeReading¶
- class QGyroscopeReading¶
The
QGyroscopeReadingclass represents one reading from the gyroscope sensor. More…Synopsis¶
Properties¶
Methods¶
Note
This documentation may contain snippets that were automatically translated from C++ to Python. We always welcome contributions to the snippet translation. If you see an issue with the translation, you can also let us know by creating a ticket on https:/bugreports.qt.io/projects/PYSIDE
Detailed Description¶
The reading contains 3 values, measured in degrees per second that define the movement of the device around the x, y and z axes. Unlike
QRotationReading, the values represent the current angular velocity rather than a fixed rotation. The measurements are in degrees per second.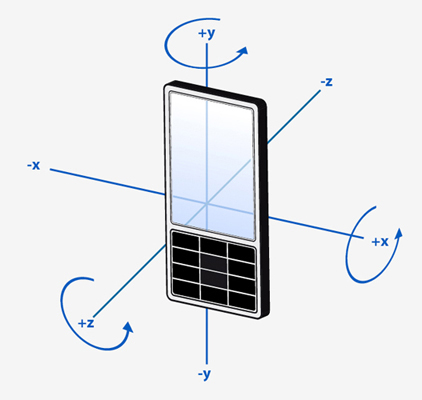
Note
Properties can be used directly when
from __feature__ import true_propertyis used or via accessor functions otherwise.- property xᅟ: float¶
This property holds the angular velocity around the x axis..
Measured as degrees per second.
See also
QGyroscopeReading Units- Access functions:
- property yᅟ: float¶
This property holds the angular velocity around the y axis..
Measured as degrees per second.
See also
QGyroscopeReading Units- Access functions:
- property zᅟ: float¶
This property holds the angular velocity around the z axis..
Measured as degrees per second.
See also
QGyroscopeReading Units- Access functions:
- setX(x)¶
- Parameters:
x – float
Sets the angular velocity around the x axis to
x.See also
- setY(y)¶
- Parameters:
y – float
Sets the angular velocity around the y axis to
y.See also
- setZ(z)¶
- Parameters:
z – float
Sets the angular velocity around the z axis to
z.See also
Getter of property
xᅟ.Getter of property
yᅟ.Getter of property
zᅟ.