QGyroscopeReading Class
QGyroscopeReading 클래스는 자이로스코프 센서의 판독값 하나를 나타냅니다. 더 보기...
| 헤더: | #include <QGyroscopeReading> |
| CMake: | find_package(Qt6 REQUIRED COMPONENTS Sensors)target_link_libraries(mytarget PRIVATE Qt6::Sensors) |
| qmake: | QT += sensors |
| 상속합니다: | QSensorReading |
속성
공공 기능
| void | setX(qreal x) |
| void | setY(qreal y) |
| void | setZ(qreal z) |
| qreal | x() const |
| qreal | y() const |
| qreal | z() const |
상세 설명
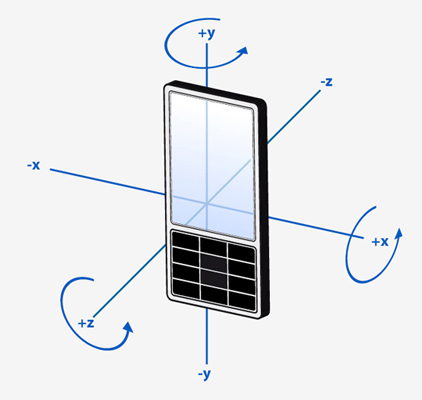
Q자이로스코프판독 단위
이 판독값에는 초당 도 단위로 측정되는 3개의 값이 포함되어 있으며, 이 값은 x, y 및 z 축을 중심으로 기기의 움직임을 정의합니다. QRotationReading 과 달리 이 값은 고정된 회전이 아닌 현재 각속도를 나타냅니다. 측정값은 초당 도 단위입니다.
속성 문서
[read-only] x : qreal
이 프로퍼티는 X축을 중심으로 각속도를 보유합니다.
초당 도 단위로 측정됩니다.
함수에 액세스합니다:
| qreal | x() const |
QGyroscopeReading Units 를참조하세요 .
[read-only] y : qreal
이 프로퍼티는 Y축을 중심으로 각속도를 보유합니다.
초당 도 단위로 측정됩니다.
함수에 액세스합니다:
| qreal | y() const |
QGyroscopeReading Units 를참조하세요 .
[read-only] z : qreal
이 프로퍼티는 z축을 중심으로 각속도를 보유합니다.
초당 도 단위로 측정됩니다.
함수에 액세스합니다:
| qreal | z() const |
QGyroscopeReading Units 를참조하세요 .
© 2026 The Qt Company Ltd. Documentation contributions included herein are the copyrights of their respective owners. The documentation provided herein is licensed under the terms of the GNU Free Documentation License version 1.3 as published by the Free Software Foundation. Qt and respective logos are trademarks of The Qt Company Ltd. in Finland and/or other countries worldwide. All other trademarks are property of their respective owners.
