CANバスマネージャー
この例では、CANバスフレームを送受信します。
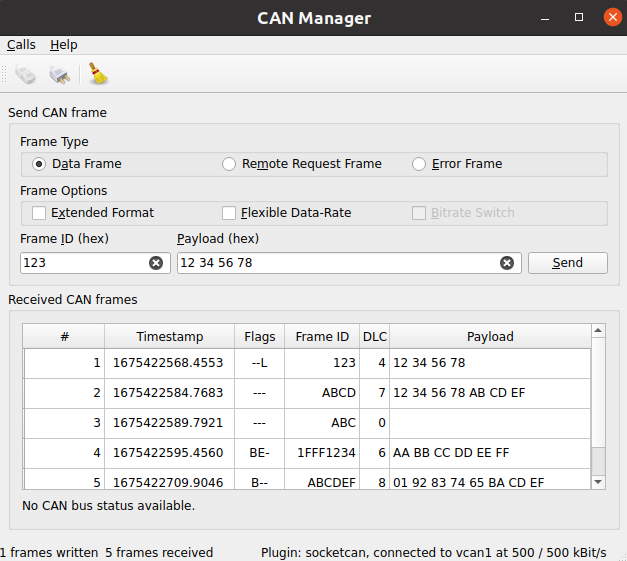
この例では、CANバスフレームを送受信します。受信したフレームは、タイプに従って順序付けられます。CANバスの接続パラメーターを調整するための接続ダイアログが表示されます。
キー Qt Serial Busこの例で使用されているクラス
QCanBusDeviceの作成
CAN通信を実行するには、QCanBusDevice のインスタンスが必要です。
ConnectDialog 、必要なパラメーターをすべて指定できます。その後、提供されたプラグイン名とインターフェイス名を使用してデバイスが作成されます:
QString errorString; m_canDevice.reset(QCanBus::instance()->createDevice(p.pluginName, p.deviceInterfaceName, &errorString)); connect(m_canDevice.get(), &QCanBusDevice::errorOccurred, this, &MainWindow::processErrors); connect(m_canDevice.get(), &QCanBusDevice::framesReceived, this, &MainWindow::processReceivedFrames); connect(m_canDevice.get(), &QCanBusDevice::framesWritten, this, &MainWindow::processFramesWritten);
確立された接続により、受信フレームの処理、送信フレームの制御、エラー処理が可能になります。
デバイスが作成されたら、QCanBusDevice::connectDevice() を使用して通信を開始します。
受信フレームの処理
QCanBusDevice は、新しいフレームが利用可能になるとframesReceived() シグナルを発信します。available frames がある間は、readFrame() メソッドを使用して、単一のQCanBusFrame を読み取ることができます。フレームを受信すると、frameId 、timeStamp 、payload などの個々のパラメータを抽出することができます:
while (m_canDevice->framesAvailable()) { m_numberFramesReceived++; const QCanBusFrame frame = m_canDevice->readFrame(); QString data; if (frame.frameType() == QCanBusFrame::ErrorFrame) data = m_canDevice->interpretErrorFrame(frame); else data = QString::fromLatin1(frame.payload().toHex(' ').toUpper()); const QString time = QString::fromLatin1("%1.%2 ") .arg(frame.timeStamp().seconds(), 10, 10, ' '_L1) .arg(frame.timeStamp().microSeconds() / 100, 4, 10, '0'_L1); const QString flags = frameFlags(frame); const QString id = QString::number(frame.frameId(), 16).toUpper(); const QString dlc = QString::number(frame.payload().size()); m_model->appendFrame(QStringList({QString::number(m_numberFramesReceived), time, flags, id, dlc, data})); }
フレームの送信
カスタムデータをCANバスで送信するには、ユーザーは少なくともframeId とpayload を提供する必要があります。オプションで、その他のQCanBusFrame パラメータを設定することもできます:
const uint frameId = m_ui->frameIdEdit->text().toUInt(nullptr, 16); QString data = m_ui->payloadEdit->text(); m_ui->payloadEdit->setText(formatHexData(data)); const QByteArray payload = QByteArray::fromHex(data.remove(u' ').toLatin1()); QCanBusFrame frame = QCanBusFrame(frameId, payload); frame.setExtendedFrameFormat(m_ui->extendedFormatBox->isChecked()); frame.setFlexibleDataRateFormat(m_ui->flexibleDataRateBox->isChecked()); frame.setBitrateSwitch(m_ui->bitrateSwitchBox->isChecked()); if (m_ui->errorFrame->isChecked()) frame.setFrameType(QCanBusFrame::ErrorFrame); else if (m_ui->remoteFrame->isChecked()) frame.setFrameType(QCanBusFrame::RemoteRequestFrame);
フレームが準備されると、QCanBusDevice::writeFrame() メソッドを使用して送信できます:
m_canDevice->writeFrame(frame);
例の実行
から例を実行するには Qt Creatorから例を実行するには、Welcome モードを開き、Examples から例を選択する。詳しくは、Qt Creator:チュートリアルを参照:ビルドと実行
© 2026 The Qt Company Ltd. Documentation contributions included herein are the copyrights of their respective owners. The documentation provided herein is licensed under the terms of the GNU Free Documentation License version 1.3 as published by the Free Software Foundation. Qt and respective logos are trademarks of The Qt Company Ltd. in Finland and/or other countries worldwide. All other trademarks are property of their respective owners.
